Lataa esitys
Esittely latautuu. Ole hyvä ja odota

1
Mikä on CAN? • CAN (Controller Area Network) on autojen hajautettujen
ohjausjärjestelmien reaaliaikaiseen tiedonsiirtoon suunniteltu tiedonsiirtoväylä • ajoneuvojen lisäksi CAN väylää sovelletaan laajalti muuallakin • busseissa, työkoneissa, maatalouskoneissa, hisseissä, lääketieteellisissä laitteissa, kappaletavara-automaatiossa, roboteissa, tekstiilikoneissa, mittausjärjestelmissä, ohjelmoitavissa logiikoissa … • kun tarve on lyhyillä tiedonsiirtoetäisyyksillä siirtää reaaliaikaisesti lyhyitä sanomia kontrollereiden välillä.

2
Miksi CAN ? • Lisääntyvä elektroniikka kasvattaa johdotuksen kokonaismäärää aiheuttaen kustannus -, paino, tila- ja asennusongelmia • elektroniset ohjaukset voivat jakaa saman anturitiedon ja välittää tietoja toisilleen • väylän kautta diagnostiikka on helpompaa, koska kaikki anturitiedot ovat luettavissa. Toimilaitteita voidaan ohjata testerillä • uusien laitteiden lisääminen sähköjärjestelmään helpottuu

3
Väylän rakenne

4
Tiedonsiirron periaate
CAN-tietoväylän avulla tapahtuva tiedonsiirto toimii puhelinneuvottelun tapaan: Yksi verkon jäsenistä (ohjainlaite) kertoo asiansa, jolloin kaikki muut kuulevat sen. Osa jäsenistä pitää tietoa tärkeänä ja käyttää sitä hyväkseen. Muut jättävät tiedon vaille huomiota.
 kertoo asiansa, jolloin kaikki muut kuulevat sen. Osa jäsenistä pitää tietoa tärkeänä ja käyttää sitä hyväkseen. Muut jättävät tiedon vaille huomiota.")
5
Perinteinen johdotus

6
Multipleksaus CANin avulla

7
CAN-väylän perusominaisuudet

8
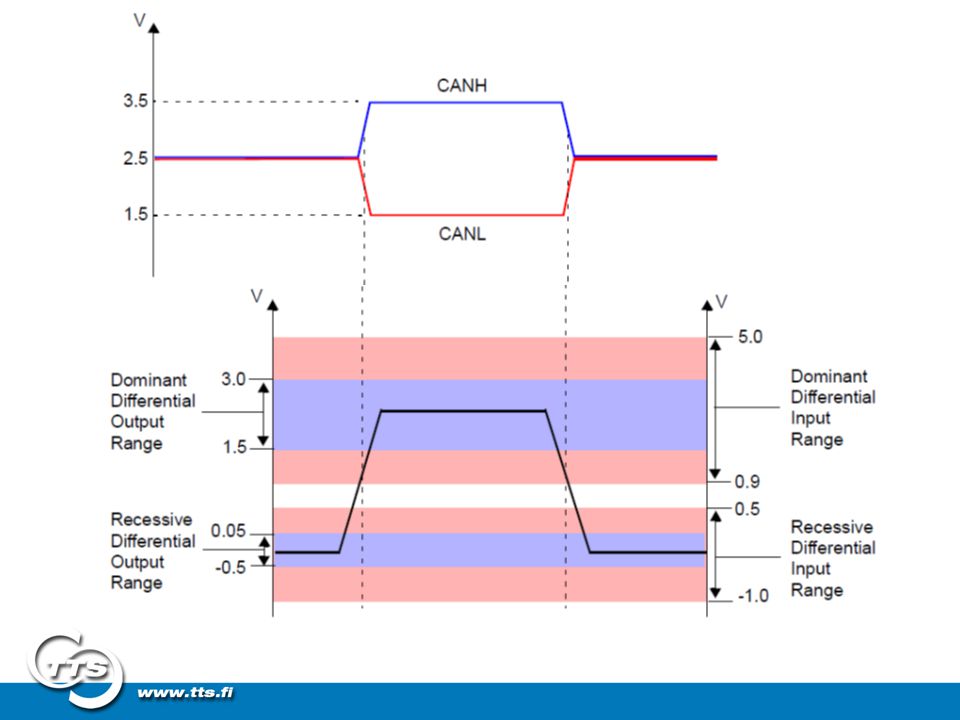
Fyysinen kerros

10
Kilpavarausperiaate

11
CAN-väylän mittaus

12
CAN-väylän mittaus

13
CAN väylävikoja ja seurauksia
• Oikosulku • liikennöinti loppuu • CAN_H/CAN_L • CAN_L/Vcc • CAN_H/GND • symmetrisyys muuttuu • CAN_L/GND • CAN_H/Vcc • CAN_H/CAN_L ristissä • signaalit menevät väärinpäin • ei kuule muita, muut ei ymmärrä • Terminointivirheet • liikaa vastusta • siirtyminen dominantista resessiiviseen tilaan hidastuu • liian vähän vastusta • dominanttitaso laskee • ei terminointia • CAN_L puuttuu, koska se tuotetaan terminointivastuksen avulla (differentiaalinen signaali) • liikennöinti ei toimi kunnolla • Terminointivastukset sijoitettu väärin • molemmat ovat samassa päässä väylää tai • on kolme vastusta + suuri Kaapeliresistanssi jolloin DC resistanssi on oikein, mutta seurauksena on heijastuksia • Väärä kaapelin impedanssi • Seurauksena on heijastuksia • Suuri kaapelin resistanssi • maapotentiaalit solmuilla erilaiset • yhdessä terminointivastusten kanssa aiheuttaa signaalitason heikkenemisen
 • liikennöinti ei toimi kunnolla. • Terminointivastukset sijoitettu väärin. • molemmat ovat samassa päässä väylää. tai. • on kolme vastusta + suuri. Kaapeliresistanssi jolloin DC resistanssi on oikein, mutta seurauksena on heijastuksia. • Väärä kaapelin impedanssi. • Seurauksena on heijastuksia. • Suuri kaapelin resistanssi. • maapotentiaalit solmuilla erilaiset. • yhdessä terminointivastusten kanssa aiheuttaa signaalitason heikkenemisen.")
14
LIN-väylän kuvaus Local Interconnect Network
14 +24V 0V Local Interconnect Network Pieni ja hidas verkkojärjestelmä Yksi isäntä ja useita orjia (maks. 16) Tiedonsiirtonopeus 20 Kb/s LIN-väylä
 Tiedonsiirtonopeus 20 Kb/s. LIN-väylä.")
15
Nopean väylän esimerkkikuva:

16
Hitaan väylän esimerkkikuva:

17
Huom! Sähköjärjestelmän virta on katkaistava ennen CAN-johtojen vastuksen mittaamista. Järjestelmiä ei tarvitse kytkeä irti. Koska CAN H:n ja CAN L:n jännite vaihtelee jatkuvasti lähetettävän signaalin ykkösten (1) tai nollien (0) mukaisesti, CAN-tietoliikennettä ei voida mitata yleismittarilla. Poikkeuksen tästä säännöstä muodostavat päätevastukset, joiden eheys voidaan tarkistaa. CAN-tietoliikennettä varten jokaisessa väylässä on oltava kaksi päätevastusta. Päätevastusten eheys voidaan tarkistaa mittaamalla CAN H:n ja CAN L:n välinen vastus yleismittarilla. Mittaus tulee tehdä kunkin CAN-väylän liittimelle. Yhtä koetinkärkeä pidetään valkoisen johtimen jotakin liitinkosketinta vasten ja toista koetinta värillisen johtimen liitinkosketinta vasten. Kunkin CAN-väylän vastuksen tulee olla 60 ohmia. Jos vastus on 120 ohmia, kyseisestä piiristä puuttuu päätevastus. 60 60
 tai nollien (0) mukaisesti, CAN-tietoliikennettä. ei voida mitata yleismittarilla. Poikkeuksen tästä säännöstä muodostavat päätevastukset, joiden eheys voidaan tarkistaa. CAN-tietoliikennettä varten jokaisessa väylässä on oltava kaksi päätevastusta. Päätevastusten eheys voidaan tarkistaa mittaamalla CAN H:n ja CAN L:n välinen. vastus yleismittarilla. Mittaus tulee tehdä kunkin CAN-väylän liittimelle. Yhtä. koetinkärkeä pidetään valkoisen johtimen jotakin liitinkosketinta vasten ja toista koetinta värillisen johtimen liitinkosketinta vasten. Kunkin CAN-väylän vastuksen tulee olla 60 ohmia. Jos vastus on 120 ohmia, kyseisestä piiristä puuttuu päätevastus")
Samankaltaiset esitykset









 Siirtonopeudessa päästään luokkaan Gbit/s. LVDS-signaaleita käytetään.>")









